A
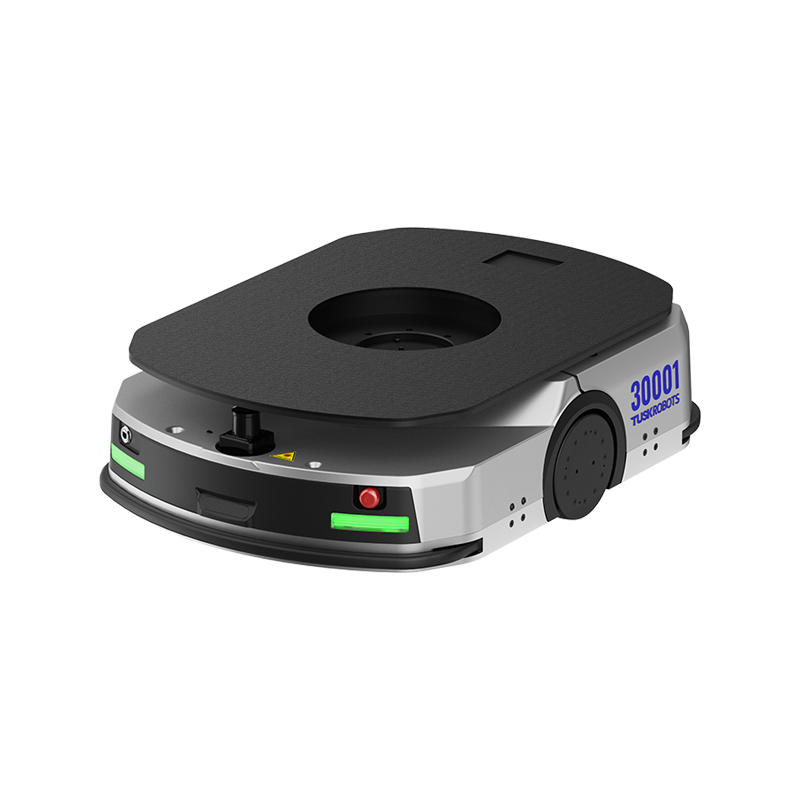
pallet handling robot transports items to a designated location by following a series of steps and using various components and systems to ensure efficient and accurate movement. Here's an overview of how it typically transports items to their intended destinations:
1.Task Assignment: The robot receives instructions on the tasks it needs to perform from a central control system, a warehouse management system (WMS), or an operator. These instructions include details about the location of the items (usually stored on pallets) to be transported and the destination where they should be delivered.
2.Navigation Planning: The robot's onboard navigation system, which includes sensors and mapping algorithms, plans the optimal path from its current location to the designated destination. The path planning takes into account factors such as the layout of the facility, the location of obstacles, and the need to avoid collisions.
3.Obstacle Detection and Avoidance: As the robot moves, it continuously uses its sensors (e.g., Lidar, cameras, ultrasonic sensors) to detect obstacles, pallets, and other objects in its path. If an obstacle is detected, the robot's control system adjusts its path or comes to a complete stop to avoid collisions.
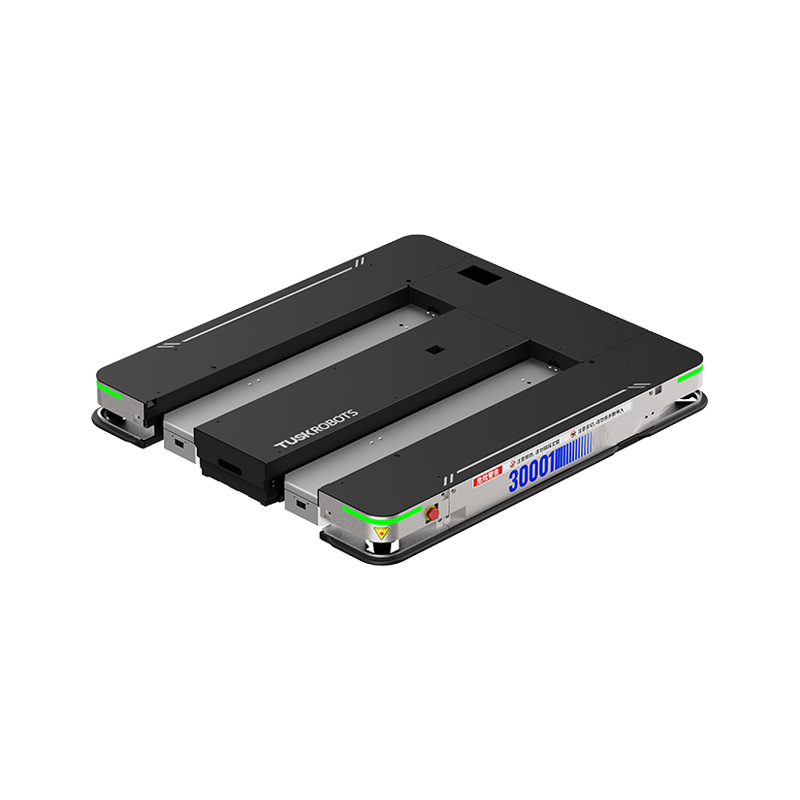
4.Pallet Pickup: When the robot reaches the location of the pallet it needs to transport, it uses a specialized gripper or end-effector to securely grasp the pallet. The gripper may be equipped with sensors to ensure proper alignment and gripping force.
5.Pallet Handling: With the pallet securely grasped, the robot lifts it and begins to transport it to the designated location. Depending on the robot's design and capabilities, it may use wheels, tracks, or other mobility mechanisms for movement.
6.Path Following: The robot follows the pre-planned path, making necessary adjustments for accurate positioning. It continuously monitors its position relative to the path and makes corrections to stay on course.
7.Interacting with the Environment: During transport, the robot may need to interact with various elements of its environment, such as pallet racks, conveyor systems, or automated storage and retrieval systems (AS/RS). It may need to align the pallet with a specific rack or conveyor for loading or unloading.
8.Destination Arrival: Upon reaching the designated location, the robot carefully places the pallet in the correct position. The gripper or end-effector releases the pallet, and the robot ensures that it is properly aligned and stable before moving away.
9.Task Completion Confirmation: The robot communicates with the control system to confirm that the task has been completed successfully. It may also update its status and provide data related to the task's execution.
10.Return to Base or Next Task: After completing a task, the robot can return to a charging station for recharging if needed. Alternatively, it may receive instructions for its next task and continue its operations.
Throughout this process, the robot's sensors and control systems work together to maintain safety by avoiding collisions, ensuring accurate positioning, and adapting to dynamic changes in the environment. The ability to autonomously navigate and transport items to designated locations makes pallet handling robots valuable tools for improving efficiency and reducing labor costs in material handling operations.
 Marketing Department Email
Marketing Department Email Human Resources Email
Human Resources Email Inquiry
Inquiry 





 中文简体
中文简体 中文繁体
中文繁体 English
English 日本語
日本語 Deutsch
Deutsch 한국어
한국어